9.1 KiB
!!!! ATTENTION : !!!! Ce contenu n'est pas un cours validé ! !!!! Page non répertoriée
Collection d'éléments de cours : Concepts, vocabulaire et équations
Analyse vectorielle
Vecteur
Objects mathématiques avec 3 caractéristiques : norme, direction et sens.
En mécanique, représentation graphique dans l'espace tridimensionnel :
- des sègments de droites indiquant leur direction.
- sègments de droite de longueur proportionnelle à leur norme.
- par une flèche indiquant leur sens.
Signification des vecteurs en mécanique.
-
Les vecteurs peuvent représenter des grandeurs physiques différentes.
exemple : vecteur vitesse du point M, et la force qui s’applique sur le point M. -
Les normes de vecteurs correspondant à des grandeurs physiques différentes (exemple : vitesse et force) s’expriment dans des unités différentes (respectivement : $
m.s^{-1}$ et $N$). Elles ne peuvent pas être comparées.
Vecteurs colinéaires et non colinéaires
-
Deux vecteurs $
\vec{A}$ et $\vec{B}$ sont colinéaires s’ils ont la même direction :
Il existe alors un nombre réel $\alpha$ tel que l’on peut écrire $\overrightarrow{A}=\alpha\cdot\overrightarrow{B}$
" $\vec{A}$ et $\vec{B}$ sont colinéaires" $\Longleftrightarrow \exists \alpha\in\mathbb{R}\quad\overrightarrow{A}=\alpha\cdot\overrightarrow{B}$ -
Deux vecteurs $
\vec{A}$ et $\vec{B}$ sont non colinéaires s’ils ont des directions différentes. Pour tout nombre réel $\alpha$ on peut écrire $\overrightarrow{A}\ne\alpha\cdot\overrightarrow{B}$. -
"$
\vec{A}$ et $\vec{B}$ sont non colinéaires" $\Longleftrightarrow \forall\; \alpha\in\mathbb{R}$$\quad\overrightarrow{A}\ne\alpha\cdot\overrightarrow{B}$
Base vectorielle
Dans un plan $\mathcal{P}$
-
Définition :
2 vecteurs $\vec{a}$ et $\vec{b}$ appartenant à un plan $\mathcal{P}$, non nuls, non colinéaires et ordonnés dans une suite $(\vec{a}\,,\,\vec{b})$ forment une base $(\vec{a}\,,\,\vec{b})$ de ce plan. -
Propriété :
Si $(\vec{a}\,,\,\vec{b})$ est une base d'un plan $\mathcal{P}$, alors tout vecteur $\vec{V}$ de $\mathcal{P}$ se décompose de façon unique en une combinaison linéaire des vecteurs de base $\vec{a}$ et $\vec{b}$. -
Écriture mathématique :
"$(\overrightarrow{a},\overrightarrow{b})$ est une base de $\mathcal{P}$" $\Longrightarrow \quad\forall \overrightarrow{V}\in\mathcal{P}$$\quad\exists ! (\alpha,\beta)\in\mathbb{R}^2$$\quad \overrightarrow{V}=\alpha\cdot\overrightarrow{a}+\beta\cdot\overrightarrow{b}$
Dans un espace vectoriel $\mathcal{E}$ de dimension $n$
-
n vecteurs ordonnés dans un n-upplet $
(\vec{e_1},\vec{e_2},...,\vec{e_n})$ forment une base d'un espace vectoriel $\mathcal{E}$ de dimension $n$, si tout vecteur $\vec{V}$ de cet espace $\mathcal{E}$ se décompose de façon unique en une combinaison linéaire des vecteurs $\vec{e_1},\vec{e_2},...,\vec{e_n}$. -
"$
(\vec{e_1},\vec{e_2},...,\vec{e_n})$ est une base de $\mathcal{E}$"$\quad\Longrightarrow \quad\forall \overrightarrow{V}\in\mathcal{E}$$\quad\exists ! (\alpha_1,\alpha_1,...;\alpha_1)\in\mathbb{R}^n$$\quad \overrightarrow{V}=\alpha_1\cdot\overrightarrow{e_1}+\alpha_2\cdot\overrightarrow{e_2}+...+\alpha_n\cdot\overrightarrow{e_n}$
Systèmes de coordonnées / Repère de l’espace
-
En mécanique classique, temps et espace ne sont pas couplés.
-
Dans l’espace, la position d’un point M est repérée à partir d’un point O origine de l’espace par le vecteur $
\vec{OM}$ . -
L’espace classique de Newton a 3 dimensions. Cela signifie que, à partir de l’origine O de l’espace, la position de tout point M peut-être définie de façon unique par 3 nombres réels, appelés ** coordonnées** (ou coordonnées spatiales) du point M.
-
Il y a plusieurs façons possible de définir les coordonnées spatiales : On parle de systèmes de coordonnées.

Exemples de systèmes de coordonnées.
Caractéristiques d’une base / d’un repère
Base normée $(\vec{a},\vec{b},\vec{c})$ / repère normé $(O,\vec{a},\vec{b},\vec{c})$
-
Les vecteurs de la base ou du repère sont de norme unité.
-
$
||\overrightarrow{a}||=1\; ; \;||\overrightarrow{b}||=1\; ; \;||\overrightarrow{c}||=1$ .
Base orthogonale $(\vec{a},\vec{b},\vec{c})$ / repère orthogonal $(O,\vec{a},\vec{b},\vec{c})$
-
Les vecteurs de la base ou du repère sont orthogonaux 2 à 2.
-
$
\overrightarrow{a}\perp\overrightarrow{b}\; ; \;\overrightarrow{a}\perp\overrightarrow{c}\; ; \;\overrightarrow{b}\perp\overrightarrow{c}$.
Base orthonormée $(\vec{e_1},\vec{e_2},\vec{e_3})$ / repère orthonormé $(O,\vec{e_1},\vec{e_2},\vec{e_3})$
-
orthonormé = ortho+normé :
- ortho : $\forall (\vec{e_i},\vec{e_j}) \in \{\vec{e_1},\vec{e_2},\vec{e_3}\}^2 \quad \vec{e_i}\perp\vec{e_j}$.
- normé : $\forall \vec{e_i} \in \{\vec{e_1},\vec{e_2},\vec{e_3}\} \quad ||\vec{e_i}||=1$. -
orthonormé : $
\forall (\vec{e_i},\vec{e_j}) \in \{\vec{e_1},\vec{e_2},\vec{e_3}\}^2 \quad \overrightarrow{e_i}\cdot\overrightarrow{e_j}=\delta_{i\,j}$
avec le symbole e Kronecker $\delta_{i\,j}$ défini par :
$\delta_{i\,j}=1$ si $i=j\quad$ et $\quad\delta_{i\,j}=0$ si $i \ne j$
Règle d'orientation de l'espace.
-
Deux vecteurs $
\vec{a}$ et $\vec{b}$ unitaires et non colinéaires forment une base normée $(\vec{a},\vec{b})$ d'un plan dans l'espace. -
Cette base $
(\vec{a},\vec{b})$ peut être complétée par un troisième vecteur $\vec{c}$, unitaire et perpendiculaire à $\vec{a}$ et à $\vec{b}$, pour former une base orthonormée $(\vec{a},\vec{b},\vec{c})$ de l'espace. -
d'un repère orthonormé $
(\vec{a},\vec{b},\vec{c})$ de l'espace définissent un plan $\mathcal{P}$. Le troisdème vecteur $\vec{c}$, perpendiculaire à la fois aux vecteurs $(\vec{a}$ et $(\vec{b}$, possède une direction donnée par la droite normale (perpendiculaire) au plan $\mathcal{P}$.
mais il y a deux sens possibles pour ce vecteur $(\vec{c}$.
-
Un vecteur $
(\vec{c}$ perpendiculaire à la fois aux vecteurs $(\vec{a}$ et $(\vec{b}$ possède une direction la droite normale (perpendiculaire) au plan $\mathcal{P}$, mais il y a deux sens possibles pour ce vecteur $(\vec{c}$. -
Ces deux sens possibles sont distingués par une règle d’orientation de l’espace : la règle des 3 doigts de la main droite :
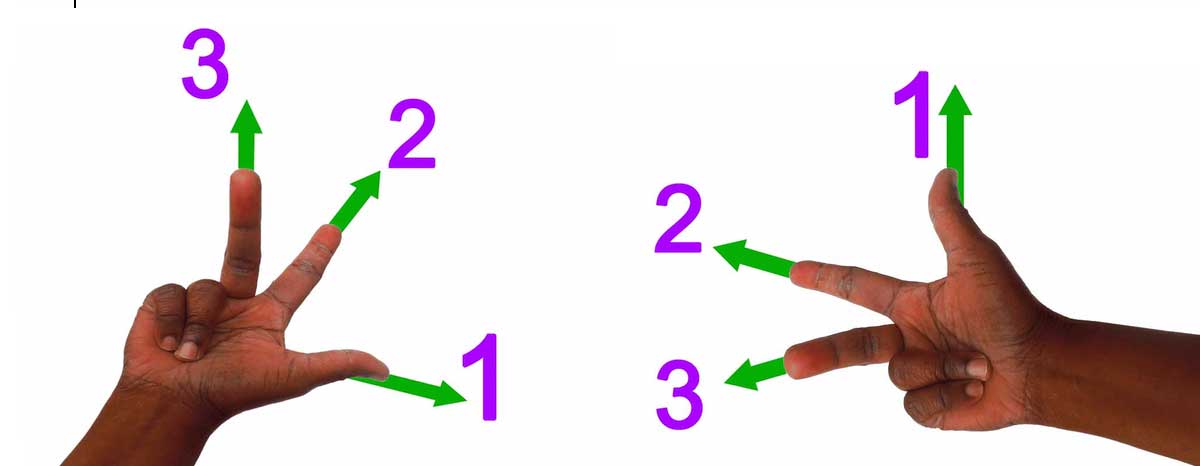
Repère orthonormé direct / indirect
Produit scalaire de 2 vecteurs / Norme d’un vecteur
Définition générale, valable dans une base quelconque
Norme d’un vecteur unitaire
Produit scalaire de 2 vecteurs colinéaires
Produit scalaire de 2 vecteurs orthogonaux
Caractéristiques des vecteurs de base d’une base orthonormée
-
Les vecteurs sont unitaires (de norme unité), donc :
-
Les vecteurs sont orthogonaux 2 à 2, donc :
Produit scalaire de 2 vecteurs dans une base orthonormée
Norme d’un vecteur dans une base orthonormée
Calcul de l’angle entre 2 vecteurs dans une base orthonormée
Produit vectoriel de 2 vecteurs
Produit vectoriel de 2 vecteurs dans une base quelconque
Produit vectoriel de 2 vecteurs dans une base orthonormée
Produit mixte de 3 vecteurs
Produit mixte de 2 vecteurs dans une base quelconque
Produit mixte de 2 vecteurs dans une base orthonormée
Dérivée d’un vecteur par rapport au temps
FR - Localiser un point dans l’espace tridimensionnel : une origine $O$, et trois axes $Ox$, $Oy$ et $Oz$ se coupant en O.
L’ensemble constitue le repère, notation $(O,x,y,z)$
Repère orthogonal : les axes sont deux à deux orthogonaux : $Ox\perp Oy$, $Ox\perp Oz$ et $Oy\perp Oz$.
base, repère de l'espace
-
base de l'espace
-
base orthonormée
-
repère cartésien de l'espace
vector / vecteur / vector
(http://www.electropedia.org/iev/iev.nsf/display?openform&ievref=102-03-04)
FR - vecteur, représentation graphique
addition et soustraction de vecteurs
(vers la statique, que nous ne faisons pas)
produit scalaire de 2 vecteurs
produit vectoriel de deux vecteurs
produit mixte
Différentielle d'un vecteur
-
rappel sur la différentielle d'une fonction
-
différentielle d'un vecteur